Carrom-playing Robot Arm
Construction and programming of 5-DOF robot arm to play Carrom, a game similar to 8-ball, ME/EE/CS 134: Advanced Robotics: Planning
Construction and programming of 5-DOF robot arm to play Carrom, a game similar to 8-ball, ME/EE/CS 134: Advanced Robotics: Planning
Occurpancy grid-based exploration algorithm via optimizing for information gain and cost-to-go for ME/CDS 234b Advanced Robotics: Planning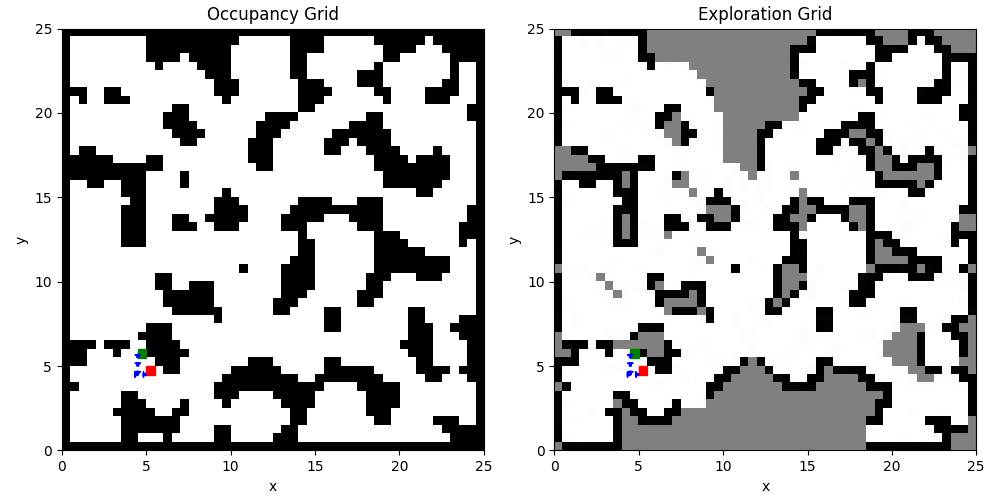
Compared D* with other graph search algorithms on large graphs to determine computation speed-up for ME/CDS 234a Advanced Robotics: Planning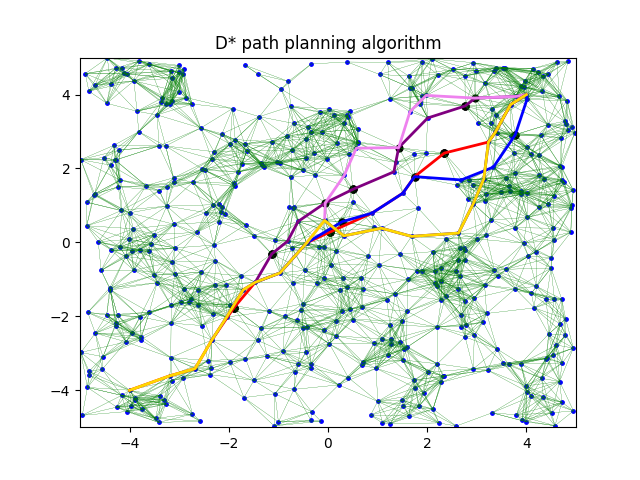
Hardware implmentation of localization, mapping, and path planning algorithms for ME/EE/CS 169: Mobile Robotics
Hierarchical PRM-based planner for quadruped walking on various environments, ME/EE/CS 133b: Robotics: Planning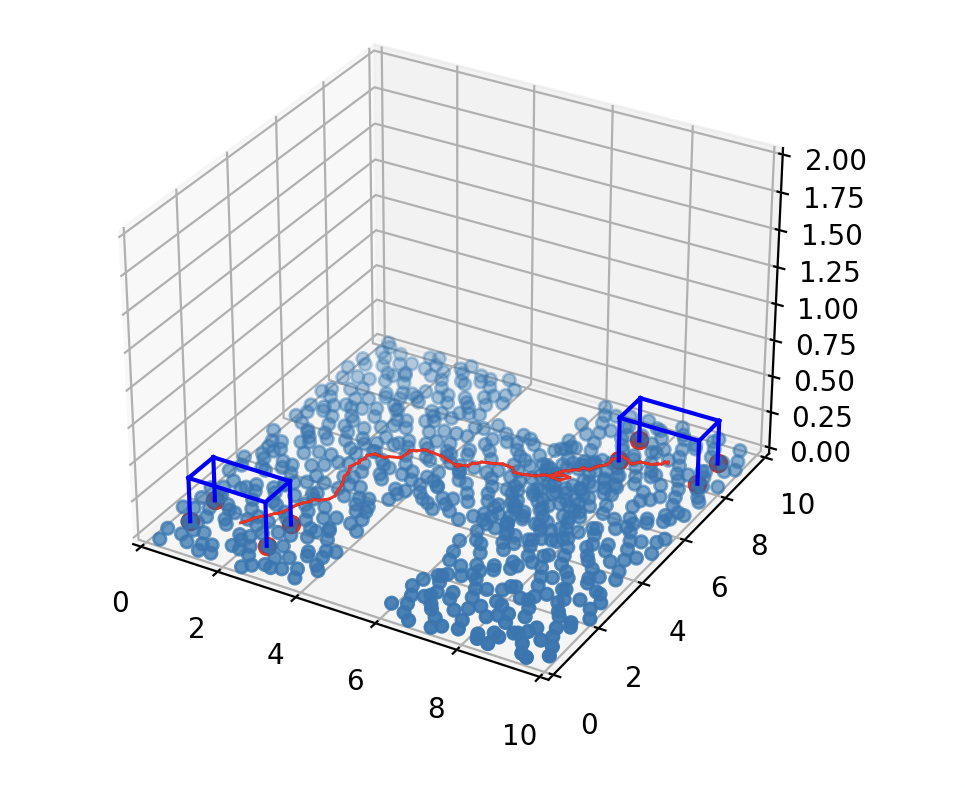
ROS kinematic demonstration of 30-DOF quadruped, designed in Solidworks, ME/EE/CS 133a: Robotics: Kinematics 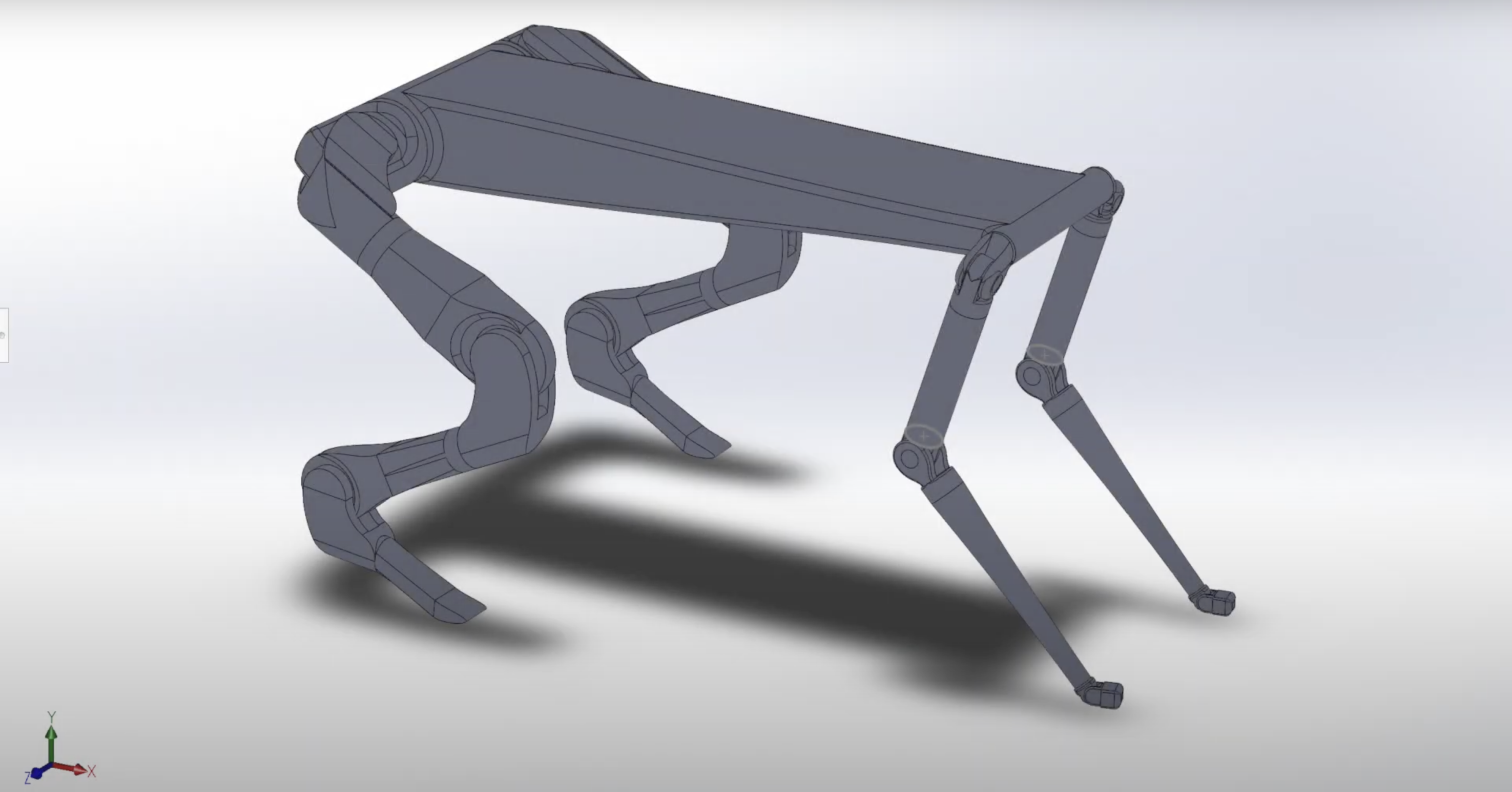
hello